
 Yahoo Actualités
Yahoo Actualités Attraper des chips sans les écraser, la prouesse d’un robot
Un laboratoire du MIT a conçu un robot préhensible doté d’une caméra de profondeur et de capteurs tactiles. La machine détecte la forme et la délicatesse des objets à saisir pour adapter sa prise.
C’est une règle élémentaire quand on fait ses courses : ne pas commencer par ranger les paquets de chips au fond du sac, pour éviter de les écrabouiller en posant dessus les pack d’eau. C’est exactement ce qu’un robot préhensible du Massachusetts Institute of Technology (MIT) est capable de faire.
La machine a été développée et testée par le laboratoire d’informatique et d’intelligence artificielle du MIT, le CSAIL, et présentée à la conférence internationale de robotique molle d’avril dernier. L’article correspondant vient de paraître dans IEEE Xplore.
Attraper sans abîmer
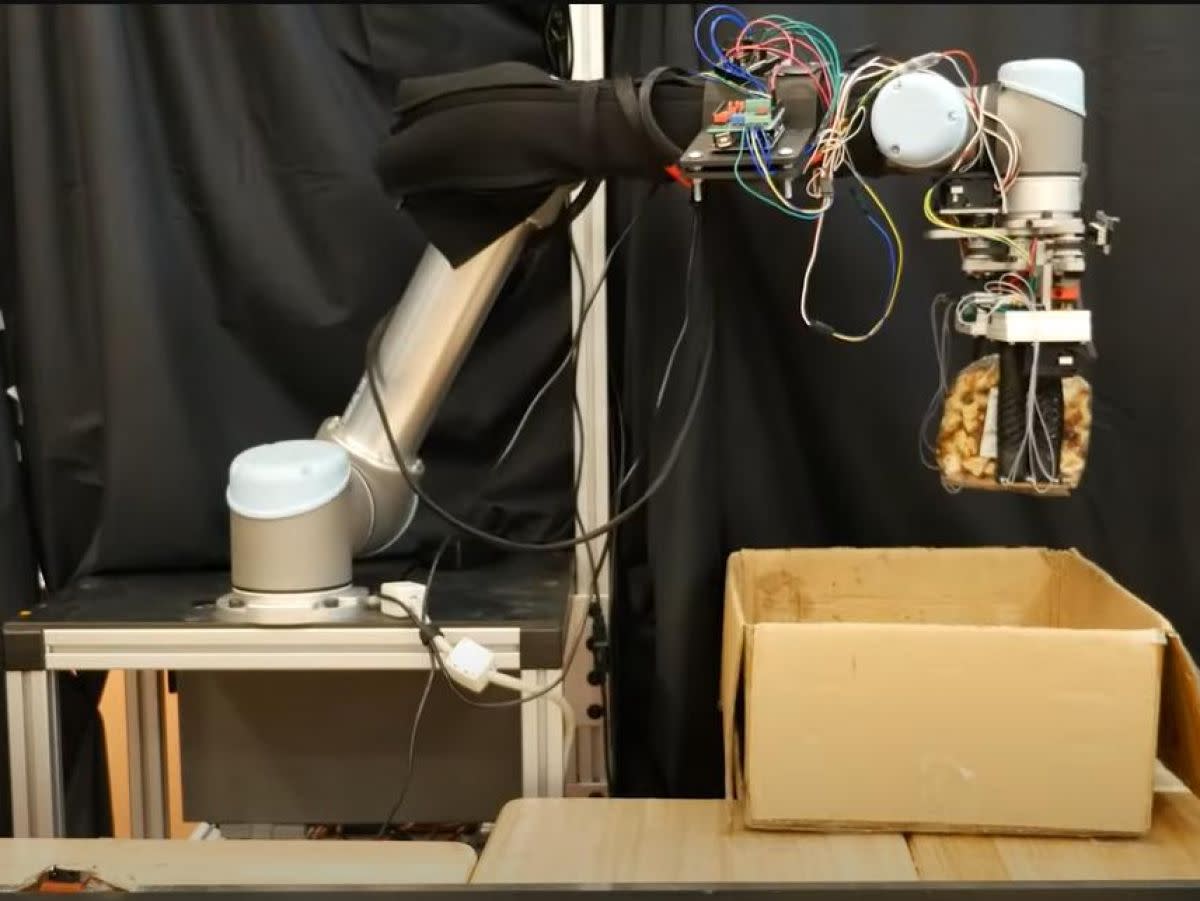
Appelé Grocery Packing Robot (robot de rangement des produits d’épicerie) , le dispositif consiste en un bras articulé terminé par quatre gros doigts préhensibles en matériau flexible. Comme on le voit sur la vidéo publiée par le laboratoire, il surplombe un tapis roulant sur lequel défile quelques produits alimentaires. Il a pour mission de les attraper pour aller les déposer dans un carton, le tout sans les abîmer.
L’opération se déroule en plusieurs étapes. Le robot est équipé d’une caméra de profondeur qui lui permet de situer les objets dans l’espace, d’estimer leur encombrement et de calculer de quelle manière les attraper. Mais l'algorithme de détection n'est pas un algorithme d'apprentissage automatique capable d'identifier les produits: l’enjeu n’est pas de classifier un objet, car ce n’est en fait pas nécessaire.
La partie préhensible de la machine se saisit alors de l’objet. Les doigts flexibles embarquant des capteurs, ils collectent l’information sur la texture du produit, sa rigidité (comme une boîte de conserve) ou sa délicatesse (celle d’un paquet de crackers ou de fruits). Cette information est donnée par la manière dont l’objet se déforme (ou ne se déforme pas) et par la pression renvoyée quand les doigts commencent à l’enserrer.
Mis de côté pour plus tard
Si la résistance est faible, cela signifie que l’objet est potentiellement fragile. Il est donc non seulement relâché mais [...]
Lire la suite sur sciencesetavenir.fr

